ارسال دیدگاه
امروز: پنج شنبه , ۴ دی , ۱۴۰۴
X
وقتی صحبت از پروژههای مهندسی نامتعارف به میان میآید، نیک زتا (Nick Zetta) توانسته جایگاهی خاص برای خود دستوپا کند. او در آخرین اختراع خود یک اسکلت بیرونی رباتیک طراحی کرده که در بازیهای شوتر دقت شما را به اندازه قابل توجهای افزایش میدهد.
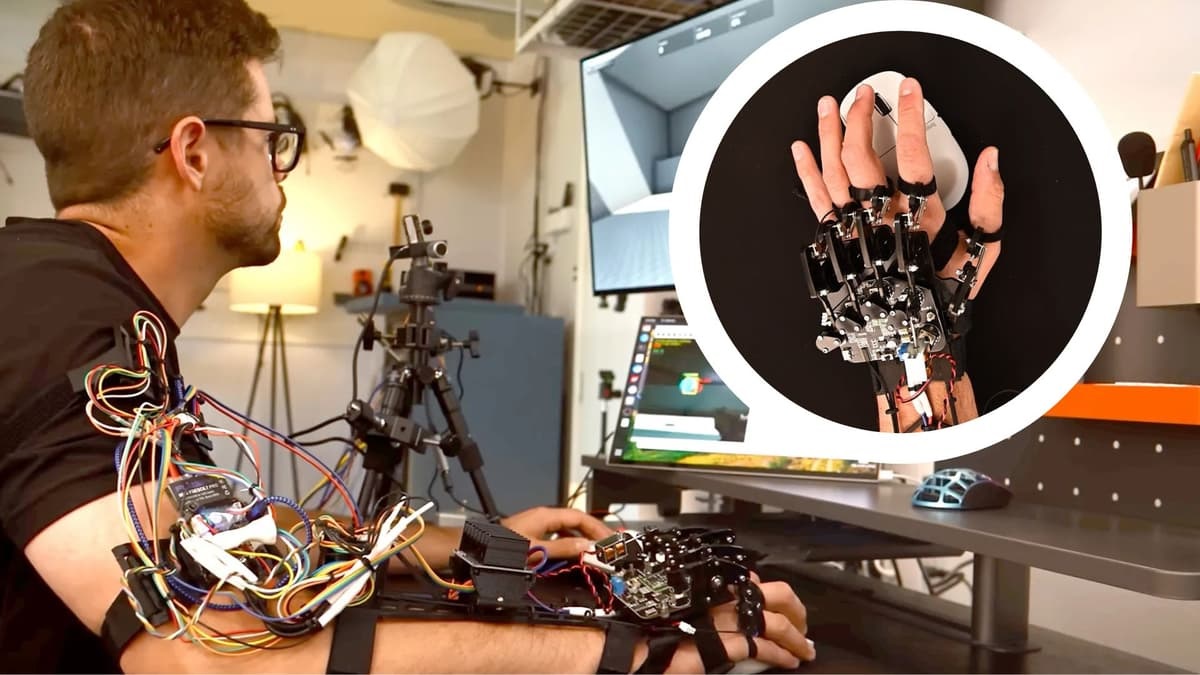
یوتیوبر شناختهشدهای که بیشتر با نام Basically Homeless شناخته میشود، اکنون اسکلت بیرونی (Exoskeleton) رباتیکی را معرفی کرده که با هدف بهبود دقت نشانهگیری در برنامه محبوب Aimlabs طراحی شده است.
این سامانه ترکیبی از بینایی مصنوعی، موتورهای محرک و قطعات چاپ سهبعدی است که بهصورت فیزیکی مچ و انگشتان دست او را هدایت میکنند.
زتا زمانی سراغ این پروژه رفت که با امتیاز ۱۳۵,۰۰۰ در Aimlabs متوقف شده بود. او به این فکر افتاد که آیا رباتیک میتواند عملکردش را از این مرز فراتر ببرد یا خیر. طراحی او شامل یک سامانه کمکی موتوری برای مچ، یک اسکلت بیرونی کلیک انگشتی مبتنی بر سلونوئید و همچنین یک سیستم بینایی مصنوعی برای شناسایی هدف بود.
آزمایشهای اولیه چندان موفقیتآمیز پیش نرفتند. اجرای نخست منجر به افت ۲۰ درصدی دقت شد، چرا که زتا در ابتدا برای سپردن کنترل حرکات خود به سیستم با مشکل روبهرو بود. اما وقتی به تدریج تطبیق پیدا کرد، توانست تنها ۳ درصد نسبت به بهترین رکورد قبلیاش پیشرفت کند.
او سپس به بهینهسازی سختافزار پرداخت. یک برد انویدیا Jetson به همراه مدل سفارشی YOLO برای بینایی رایانهای به کار گرفته شد. تأخیر از ۵۰ میلیثانیه به تنها ۱۷ میلیثانیه کاهش یافت که تقریباً آنی محسوب میشود. او با افزایش ولتاژ موتور توان سیستم را بالا برد و امکان یافت که حتی در برابر مقاومت بازو، باز هم حرکت دست را هدایت کند.
نتایج به سرعت بهتر شدند. در یکی از اجراها جهش ۱۲ درصدی ثبت شد، سپس ۲۸ درصد، بعد ۴۳ درصد و در نهایت ارتقایی برابر ۶۳ درصد حاصل گردید. این رکورد زتا را به رتبه دوم جدول ردهبندی جهانی Aimlabs رساند.
نحوه عملکرد اسکلت بیرونی
این دستگاه به کمک لولاهای چاپ سهبعدی به ساعد متصل میشود. کابلهای کولار (Kevlar) و موتورهای گیمبال حرکت مچ را کنترل میکنند، در حالی که سلونوئیدها وظیفه کلیک انگشتان را برعهده دارند.
یک دوربین پرسرعت گلوبال شاتر، دادهها را به سیستم هوش مصنوعی منتقل میکند. رایانه اهداف را شناسایی کرده و به موتورها دستور میدهد تا در لحظه وضعیت دست و مچ را اصلاح کنند.
این مجموعه رفتاری شبیه به یک ایمبات (Aimbot) فیزیکی دارد. بر خلاف ترفندهای سنتی که نرمافزاری هستند، این اسکلت بیرونی حرکات واقعی دست را تغییر میدهد.
آزمایشهای رقابتی، دقت سیستم را به نمایش گذاشتند. این سامانه امکان هدفگیری سریع و مستمر در نشانهگیری را فراهم کرد و عملاً مرز میان مهارت انسانی و اصلاح ماشینی را محو نمود.
البته زتا به دشواری یادگیری سیستم اذعان داشت. او میبایست مچ خود را رها میکرد و اجازه میداد موتورها کنترل را به دست گیرند. زمانی که توانست با این وضعیت کنار بیاید، اسکلت بیرونی دقیقاً همانطور که طراحی شده بود، عمل کرد.
پتانسیل آینده
این پروژه پرسشهایی درباره انصاف در بازیهای رقابتی برانگیخته است. دیدگاه گیمرها نسبت به ابزارهای کمکنشانهگیری و تقلب درونبازی متفاوت است، اما اکثریت بر حفظ عدالت در رقابتها تأکید دارند.
ایمباتها از دهه ۱۹۹۰ معضلی جدی بودهاند، اما توسعهدهندگان همواره با ابزارهای نرمافزاری برای مقابله با آنها تلاش کردهاند. با این حال، دستگاههای کمکی فیزیکی شناسایی سختتری دارند.
زتا این ساختار را به شوخی «اگزواسکلتون جایگزین چشم ضدکلاهبرداری» معرفی کرد. هرچند این ایده با طنز همراه بود، اما در واقعیت نشان داد که ظرفیتهای مهندسی قابلتوجهی در آن نهفته است.
او در ویدیو اشارهای گذرا به مسیر احتمالی بعدی کرد. به باورش، اگر این سامانه با عناصر عصب-عضلانی ترکیب شود، نتایج میتواند بسیار چشمگیرتر باشد. هرچند او جزئیات بیشتری ارائه نکرد، اما همین طرح کلی ذهن را به سوی افقهای بسیار بلندپروازانهتری سوق میدهد.
در حال حاضر، این اسکلت بیرونی همزمان هم بخشی از یک اجرای طنزآمیز و هم نمونهای چشمگیر از اثبات یک کانسپت است. این پروژه نشان داد که همگرایی رباتیک، هوش مصنوعی و طراحی مکانیکی میتواند واکنشهای انسانی را بهطور چشمگیری فراتر از مرزهای طبیعی پیش ببرد.
دانلود آهنگ
دیدگاهتان را بنویسید